por
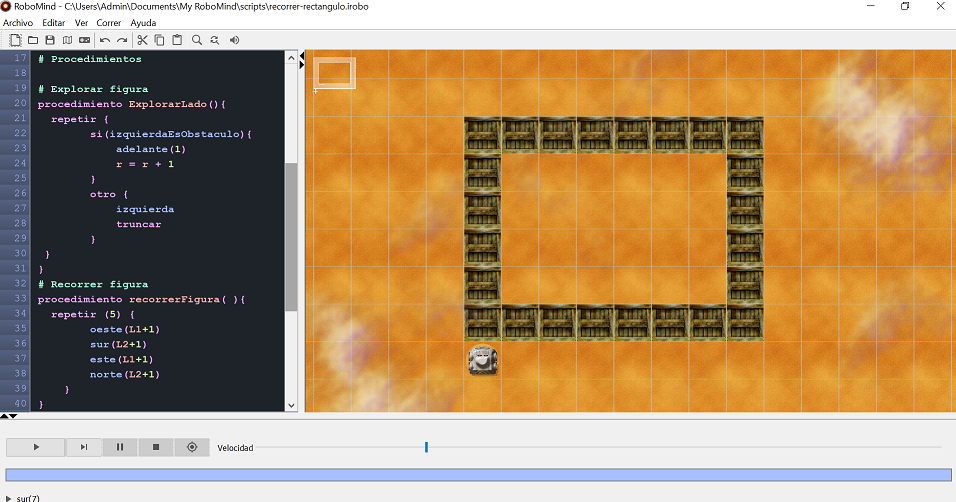
por Este es un ejercicio en RoboMind que dado cualquier mapa que tenga un rectángulo de cualquier dimensión, el robot explorar sus primeros 2 lados y luego de conocer sus longitudes lo recorre la cantidad de veces que le indiquemos a una mayor velocidad.
Puedes ver mi solución aquí y probarla con varios mapas que tengan un rectángulo elaborado con obstáculos, además, con el punto de inicio del robot en la esquina inferior izquierda como en el ejemplo que adjunto.